Раздел 5
Тактильные
датчики (Искусственная кожа)
В настоящем разделе
рассматриваются датчики, используемые в робототехнике и выполняющие функции
тактильных клеток живой кожи такие, как команда захватывающих усилий и
распознавание формы.
Конструкция. На изоляционной основе
установлена проводящая сеть (рис. 11.1,а), несущая потенциал V и
состоящая из двух групп взаимно перпендикулярных линейных проводников – (X1, Х2, ...) и (Y1,Y2, …). В каждой сформированной таким образом
прямоугольной ячейке располагается измерительный электрод, который изолирован
от окружающих его проводников и связан с массой через токоизмерительную
электрическую цепь.
Эта сборка покрыта листом
гибкого материала (резина, полибутадиен), наполненного проводящими частицами и
пропускающего ток от проводников с потенциалом V к измерительным
ячейкам.
Когда к участку такой
искусственной кожи прикладывается давление, оно вызывает сближение проводящих
частиц, что приводит к уменьшению сопротивления в затронутой зоне; это
вызывает увеличение тока в измерительных ячейках, контактирующих с объектом
(рис. 11.1,б). Координаты этих ячеек определяют зону контакта, а интенсивность
тока характеризует величину приложенного давления.
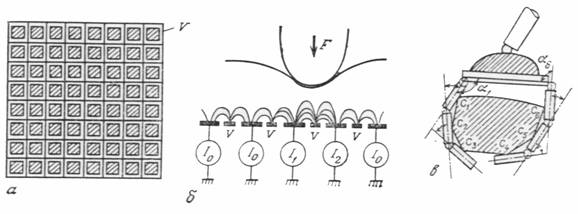
Рис. 11.1. Тактильный датчик . а – общий вид; б – принцип определения
контакта; в – принцип определения формы.
Рис. 11.1,в
иллюстрирует использование искусственной кожи для распознавания формы
(по положениям точек контакта C1, C2,
... каждой "фаланги" и по углам a1, a2, которые образуют между
собой последовательные фаланги).