Датчик момента сил
Цель работы: ознакомление с принципами работы ВОД момента сил и изучение его характеристик.
Описание работы
В основе ВОД момента сил
лежит принцип измерения линейных перемещений подвижного объекта, снабженного
отражающей поверхностью, основанный на измерении интенсивности светового потока
при изменении расстояния, проходимого пучком света, между торцом спаренного световода и отражающей поверхностью подвижного объекта.
Измерители линейных перемещений такого типа называются ВОД линейных перемещений
амплитудного типа с подвижным зеркалом. Между интенсивностью светового потока J0 на входе
датчика и интенсивностью светового потока на выходе датчика J1 существует следующая
зависимость:
(1),
где а - радиус сердцевины спаренного световода,
∆z – расстояние между торцом спаренного световода и отражающей поверхностью,
NA – угол расходимости светового пучка (числовая апертура), определяемый как:
![]()
здесь n1 – показатель преломления сердцевины,
n2 – показатель преломления оболочки.
На рис.1 представлена схема ВОД линейных перемещений с подвижным зеркалом.
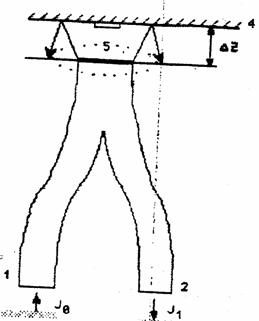
Рис.1 Схема ВОД линейных перемещений с подвижным зеркалом.
1- входное волокно, 2- выходное волокно, 3 – разветвитель, 4 – подвижное зеркало, 5 – торец спаренного световода.
Световой пучок интенсивностью J0 через входное волокно падет на отражающую поверхность 4. Часть энергии света, возвращенная зеркалом 4 в виде энергии направляемых мод, попадает в выходное волокно 2. Очевидно, чем меньше ∆z, тем больше J1 и наоборот.
На рис.2 представлена в общем виде зависимость J1/ J0 от ∆z в относительных единицах.
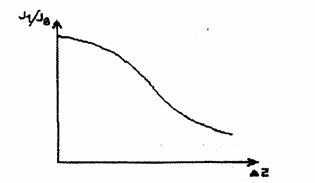
рис.2 Зависимость J1/ J0 от ∆z
Из рис.2 следует, что наибольшая интенсивность J1 на выходе световода 2 соответствует ∆z = 0 и далее монотонно убывает по мере увеличения расстояния между торцом 5 и зеркалом 4. Рассмотренный принцип построения ВОД с подвижным зеркалом позволяет измерять различные параметры, например усилие, давление, температуру и т.п. Ниже рассматривается возможность построения ВОД момента сил М. На рис.3 представлена лабораторная установка для измерения М на базе ВОД линейных перемещений амплитудного типа.
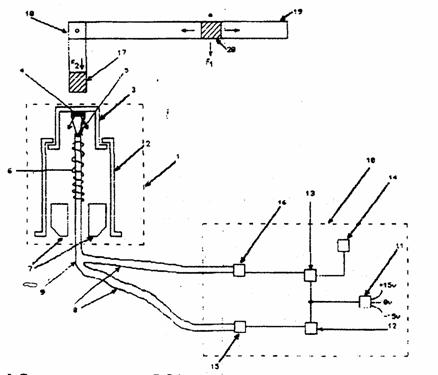
Рис.3 Структурная схема ВОД момента сил (лабораторная установка).
1 – чувствительный элемент датчика, 2 – корпус, 3 – подвижной стакан, 4 – отражающая поверхность (зеркало), 5 – торец спаренного световода, 6 – пружина, 7 – хвостовик, 8 – спаренный световод, 9 – разветвитель, 10 – приемо-передающий модуль, 11 – источник питания, 12 – усилитель мощности, 13 – усилитель постоянного тока, 14 – измеритель сигнала, 15 – источник излучения, 16 – фотоприемник, 17 – толкатель, 18 – передаточное колено, 19 – рабочее плечо, 20 – масса тела.
Принцип действия датчика
Принцип действия датчика основан на изменении интенсивности J на выходе фотоприемника 16 вследствие изменения расстояния между торцом спаренного световода 5 и зеркалом 4 при воздействии на подвижный стакан 3 момента сил M = FL, где F = mg,
L – плечо. Ниже приводится вывод основного соотношения, связывающего интенсивность излучения J1 на выходе датчика и момент сил М на входе датчика.
При перемещении массы тела m вдоль плеча 19 на подвижный стакан 3 через передаточное колено 18 воздействует толкатель 17 с силой F2, приводящей стакан в движение. В результате расстояние ∆z между зеркалом 4 и торцом 5 изменяется на некоторую величину δl, т.е. под действием силы F2 происходит сжатие пружины 6 длиной l, на величину δl. Тогда имеем: δl/l = F2/SE,
где S – площадь опорной поверхности пружины,
Е – модуль Юнга.
С другой стороны, исходя из равенства моментов сил относительно центра передаточного колена, имеем:
М1 = М2, где M1 = F1L1, а M2 = F2L2
Здесь L1 – плечо, связанное с силой F1,
L2 – плечо, связанное с силой F2.
Из вышеизложенного следует, что
F2 = F1L1/ L2, тогда откуда:
(2)
![]()
![]()
С учетом выражения (2) формула (1) преобразуется к виду:

Т.к. параметры l, L2, S, E – постоянные величины, введем коэффициент K = l/L1SE, и окончательно получаем:
(3)
или
Из выражения (3) следует, что при М1 = 0 формула (3) преобразуется в формулу (1). По мере увеличения М1 величина J1/J0 увеличивается и при ∆z = КМ это отношение достигает максимальной величины J1/ J0 = 1.
Отсюда следует, что графическое выражение (3) можно представить как на рис.4.
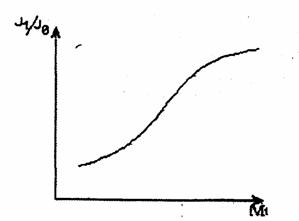
Рис.4 Зависимость J1/ J0 от М1
Лабораторная установка
Схема ВОД момента сил представлена на рис.5.

Рис.5 Схема ВОД момента сил
1 – источник питания, 2 – приемо-передающий модуль, 3 – спаренный световод, 4 – разветвитель, 5 – чувствительный элемент датчика, 6 – подвижная масса, 11 – измеритель сигнала, 12 – отражающая поверхность.
Результаты измерений
|
|
I |
II |
III |
|
0 |
1.029 |
1.031 |
1.034 |
|
1 |
1.030 |
1.037 |
1.040 |
|
2 |
1.036 |
1.042 |
1.049 |
|
3 |
1.053 |
1.043 |
1.054 |
|
4 |
1.080 |
1.051 |
1.056 |
|
5 |
1.088 |
1.072 |
1.076 |
|
6 |
1.093 |
1.080 |
1.094 |
|
7 |
1.103 |
1.092 |
1.096 |
|
8 |
1.116 |
1.107 |
1.110 |
|
9 |
1.141 |
1.108 |
1.125 |